Something else to consider is that, with astrophotography, there is always a fainter signal. While we may converge on a highly accurate value for a bright signal, say the core of M42, and further stacking may not provide any tangible benefit to the core of that nebula itself…there are fainter details around the core. And there are even fainter details around those details. And there are even fainter details farther out around those details.
There are physical limitations with both film and digital image sensors. To capture ever fainter details, we cannot simply expose for longer. Eventually we saturate the film or the sensor entirely. Further, the longer the exposure is, the more likely it is to be tainted by some kind of frame intrusion…meteor, stellite, or airplane trails. You end up with more hot pixels. Glows could appear (even for very clean CCDs).
This is where stacking becomes a key benefit. Stacking, since it does increase information quantity, allows us to avoid trails and hot pixels, at least to a degree, and when they do happen, we can apply other statistical processes to reject outlier pixels and eliminate those unwanted artifacts.
But more importantly, when it comes to faint details. You may only get one photon every minute…or even every few minutes, or even every 10 minutes! There is always a fainter signal. With ultra faint signals, you need to stack a lot more so that the signal becomes strong relative to the noise. This would be impossible if stacking did not increase the amount of information, or if the bit depth of the hardware was some kind of concrete wall. One photon per several to tens of minutes might mean one photon every few subs. With most cameras, that means those photons represent sub-ADU level information.
If the ADU of the camera was a hard limit on the precision of the data, then there would never be any chance to reveal those faint details. They would always be smaller than 1 ADU. That has been demonstrated, many times, to not be the case. In fact, even amateur astrophotographers routinely reveal details that require much greater precision than allowed by the hardware in each single sub.
So while stacking 100, 500, 10000, 80000 subs may not improve the quality of brighter signals by any meaningful degree, it can indeed allow you to reveal signals many times fainter than the camera can detect in a single exposure. There is always a fainter signal.
This image is over 400 subs stacked. Skies were ~18mag/sq". The faintest object is around 22mag/sq", a few between 21-22mag/sq". Dozens of 19-21mag/sq" objects. These are all many times fainter than my skyfog limted background, and without stacking as many subs as I did, the ultra faint ones would never have appeared:
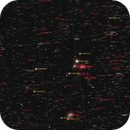
Many of these objects require finer precision than can be produced by the 12-bit ADC of my camera. Most of the 20-22 mag items would fit within a single ADU of a single sub! I could continue to integrate, as there are even fainter objects in this field. And I could continue to reveal fainter objects. It would be a monumental task, though, to get to 23mag/sq", as I would need to stack over 2500 subs! 
