I am having some minor issues with this rotator. On occasion it is flawless, however last night while imaging two targets It took multiple attempts to reach the correct angle.
Rotated to 271 and reported an 89 degrees error. On second attempt rotated again? to 271 but the focuser was reporting 0.3 on start??
I do have the reverse direction selected in the Ascom driver . Reviewing some previous threads one is led to believe that this selection is also available in SGP and not to use both.
The only reverse selection I have been able to find is for the manual rotator in SGP.
The thing to bear in mind is that the rotator angle that’s reported by the rotator is relative to an arbitrary position and relating this to the position angle requires that a calibration is done in SGP. This calibration generates a Sync offset.
The initial angle required is 271 and no calibration is done so the sync offset is zero. The rotator sets that angle and an image is collected and solved. The solved angle is 0.32 degrees so the sync offset is actually -270.6765.
After that this offset is used to convert between position angle and rotator angle.
The $64K question is do you end up with the image at the correct orientation?
If not then what’s needed is both an SGP log AND a NiteCrawler log covering the same sequence. Details of the position angle that’s requested and what you get may also be needed. This information will give people a chance to work out what’s happening.
Angles are tricky because they wrap round 0 - 360 or 180 -180., 271 and -89 are the same angle. It’s very easy for there to be confusion about this.
There is no way to reverse the direction of the rotator in SGP. The “Reverse corrections for Manual Rotator” option should really be in the manual rotator settings not on the “Other” form…that should be moved.
But yes, the ASCOM driver may need to be set to “reverse” depending on what kind of optical train you have. For my refractor I also have to reverse the direction.
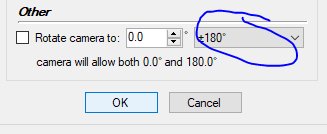
Other than that you shouldn’t need much. To Chris’ point about 271/89 you may want to check to see what is currently set on your target. Generally SGP defaults to ±180 orientation meaning that (in your case) 89 and 269 would he acceptable…and if you have your allowance in degrees to be high enough then that would likely be allowed to work:
You should be aware that after a solve and sync SGP will maintain and report the sky angle of the rotator. We don’t really care about the position that the rotator is reporting and we only use this value to keep an offset with sky angle. The Rotator angle as you see it on the ASCOM device and in SGP will almost never match up after a sync. SGP will be reporting the sky angle after that.
Thank you Gentlemen. Tonight things are working much better.
Following the advise of my fellow frozen imagers I did a solve and sync before the rotate and center and it seems to have helped immensely, but I still have my fingers crossed.
What I was doing was slewing to the target with my HC (Mach One) and then doing a rotate and center. Apparently not the best practice